Ducky
Sim2real bipedal locomotion
About the Project
Training bipedal walking policies in simulation using reinforcement learning and deploying them on real hardware via sim2real transfer.
Gallery
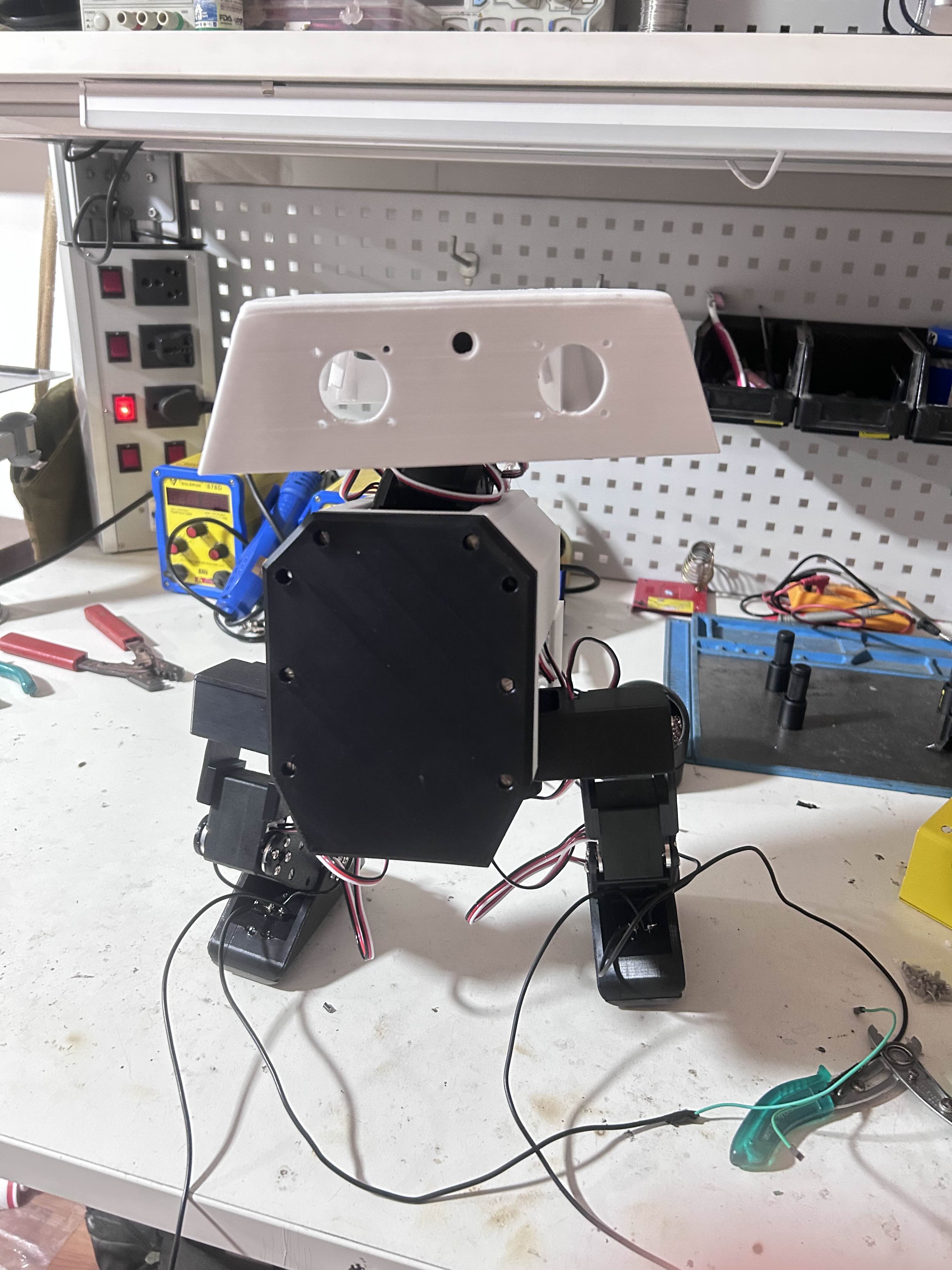
The Ducky bipedal robot
Walking policy deployed on hardware
Build and training process